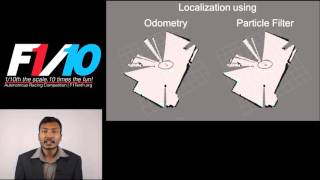
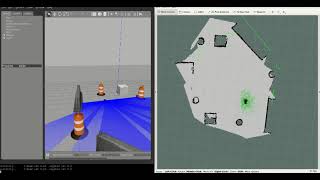
Media Summary: ... This video presents a high-level understanding of the particle filter and shows how it can be used in The simulation shows the particle filter SLAM using the ROS ... initial pose one solution to this issue is to use
Adaptive Monte Carlo Localization Amcl - Detailed Analysis & Overview
... This video presents a high-level understanding of the particle filter and shows how it can be used in The simulation shows the particle filter SLAM using the ROS ... initial pose one solution to this issue is to use In this video, Gerardo Puga presents his talk from ROSCon 2024 in Denmark, where he introduces Beluga Advanced Automation Exercise 8: Adaptive Monte Carlo Localization (AMCL) Another example shows the particles generated by
The example shows the particles generated by This video will discuss resampling and how it is used in This is my solution video for Udacity's Robotics Software Engineer nanodegree project on Map created with Cartographer. Non default parameters (can be seen at the end of the video) First upload: 2018-08-30.







![[Example] AMCL localization with Turtlebot 3 in 3D View](https://i.ytimg.com/vi/bsK30CObkDY/mqdefault.jpg)

![[Example] AMCL Localization with ROS Navigation Stack on TurtleBot3 burger Simulation in Gazebo](https://i.ytimg.com/vi/uwWHK90bK8I/mqdefault.jpg)







