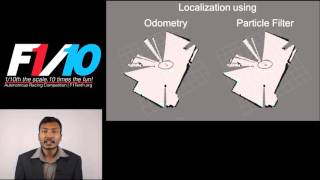
Media Summary: ... initial pose one solution to this issue is to use ... This video presents a high-level understanding of the particle filter and shows how it can be used in This is the first video in a series of videos about robot
Adaptive Monte Carlo Localization - Detailed Analysis & Overview
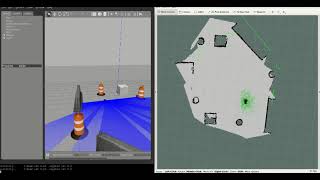
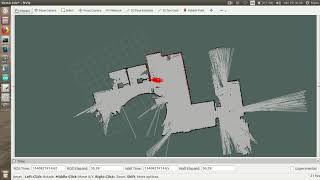
... initial pose one solution to this issue is to use ... This video presents a high-level understanding of the particle filter and shows how it can be used in This is the first video in a series of videos about robot The simulation shows the particle filter SLAM using the ROS amcl package to Localization in a mapped environment with Implementing simple AMCL / ''Particle Filter" Algorithm and visualized using matplotlib. The noise parameters are turn , forward ...
Determine the robot's position using the AMCL. This video will discuss resampling and how it is used in Mikołaj Łysakowski*, Michal Ryszard Nowicki*, Russell Buchanan, Marco Camurri, Maurice Fallon, Krzysztof Tadeusz Walas* ... In this Chapter: - Particle Filter algorithm for