Media Summary: [IEEE CSS Video Clip Contest 2015 Submission] This is a video introduction to The simulated vehicle was manually driven on the Mountain Track for 20 laps. Lane-keeping was observed by The simulated vehicle was manually driven on the Lake Track for 10 laps, 5 in one direction and 5 in the other. Virtual camera ...
Autonomous Path Tracking With Pid Steering And Speed Control - Detailed Analysis & Overview
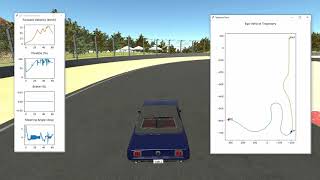
[IEEE CSS Video Clip Contest 2015 Submission] This is a video introduction to The simulated vehicle was manually driven on the Mountain Track for 20 laps. Lane-keeping was observed by The simulated vehicle was manually driven on the Lake Track for 10 laps, 5 in one direction and 5 in the other. Virtual camera ... This video demonstrates the simulation of motion This is based on Artificial Intelligence for Robotics Course at Udacity. The project uses Arduino UNO and a This is the virtual presentation recording of research paper entitled "Proximally Optimal Predictive

![[PythonRobotics] Path tracking simulation with pure pursuit steering control and PID speed control.](https://i.ytimg.com/vi/iFzmAfcQ6oM/mqdefault.jpg)
![[PythonRobotics] Path tracking simulation with LQR steering control and PID speed control.](https://i.ytimg.com/vi/XQs0BnYLbYk/mqdefault.jpg)

![[PythonRobotics] Path tracking simulation with Stanley steering control and PID speed control.](https://i.ytimg.com/vi/9sYBF_o0y5Q/mqdefault.jpg)
![[PythonRobotics] Path tracking simulation with LQR speed and steering control.](https://i.ytimg.com/vi/vFtNrirkLLM/mqdefault.jpg)
![[PythonRobotics] Model predictive speed and steering control](https://i.ytimg.com/vi/j7SlLLaPbok/mqdefault.jpg)


![[PythonRobotics] Path tracking with rear wheel feedback steering control and PID speed control](https://i.ytimg.com/vi/hyfZPR_9yAY/mqdefault.jpg)