Media Summary: CMU F1Tenth Lab7: Model Predictive Control in Tepper Quad Basement [CMU - F1Tenth] Model Predictive Contouring Control for F1Tenth Racing MPC F1Tenth dynamic avoidance 2023 09 13 23 32 43
Cmu F1tenth Lab 7 Model Predictive Control - Detailed Analysis & Overview
CMU F1Tenth Lab7: Model Predictive Control in Tepper Quad Basement [CMU - F1Tenth] Model Predictive Contouring Control for F1Tenth Racing MPC F1Tenth dynamic avoidance 2023 09 13 23 32 43 MPC F1Tenth static avoidance 2023 09 13 23 06 57 Follow the gap implementation using disparity extension with added dynamic thresholding. This research thesis, conducted in collaboration with the Autonomous Mobility and Perception
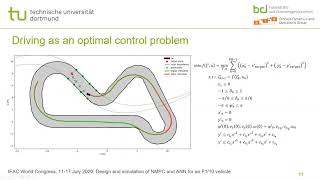
Using pure pursuit to track the local path generated by RRT. Implementation of pure pursuit based on www.ri. Originally presented at IFAC WC 2020, A. Tatulea-Codrean, T. Mariani, S. Engell. Abstract: This paper addresses the challenges ...



![[CMU - F1Tenth] Model Predictive Contouring Control for F1Tenth Racing](https://i.ytimg.com/vi/_X9e2xBAM0o/mqdefault.jpg)











![[F1TENTH] Overtaking algorithm on circuit of the americas](https://i.ytimg.com/vi/PHLMEDP0wPs/mqdefault.jpg)