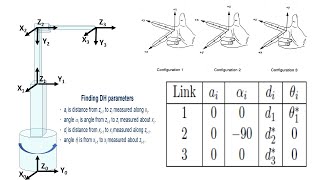
Media Summary: And s is a value of zero in this case because there is no distance along along z2 to get to the next coordinate This video explains the D-H modeling of the cylindrical robot to find the transformation matrix. For more robotics videos, go to www.robogrok.com.
Denavit Hartenberg Reference Frame Layout - Detailed Analysis & Overview
And s is a value of zero in this case because there is no distance along along z2 to get to the next coordinate This video explains the D-H modeling of the cylindrical robot to find the transformation matrix. For more robotics videos, go to www.robogrok.com. This video is a tutorial that covers the forward and inverse kinematic calculations for a 6 axis robot arm. Here are a few links ... In this video tutorial, a closer look at DH principle or This video is dedicated to my Filipino students in Robotics 1 A.Y. 2022 - 2023 course from Batangas State University and for those ...
In this video, you are given the definitions of the four This video explains the transformation between the two This is the part of the course run by TexMin, IIT (ISM) Dhanbad Introduction to the Course entitled "Industrial Robotics and ... Details of Modified vs Standard DH convention are discussed in this video along with2 examples. The handout for this is located in the worksheets folder of ...