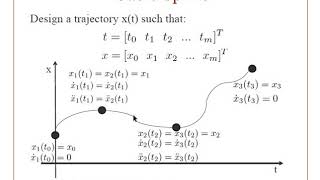
Media Summary: This video explains how we can define boundary conditions Different methods of generating parametric trajectories (joint variables as a function of time) This video is associated to the following paper : Kevin Desormeaux, Daniel Sidobre. Online
Lecture 3 4 3d Trajectory Generation Robotics - Detailed Analysis & Overview
This video explains how we can define boundary conditions Different methods of generating parametric trajectories (joint variables as a function of time) This video is associated to the following paper : Kevin Desormeaux, Daniel Sidobre. Online In this project, I will extending my PD Controller into Paul Ladinig, Bernhard Rinner, Stephan Weiss: Time and Energy Optimized Sebastian Castro discusses technical concepts, practical tips, and software examples
This video explains how to use Linear Interpolation (LERP) and Spherical Linear Interpolation (SLERP) So all all of these kinematics inversely method are useful on the part of