Media Summary: Minimum Jerk Trajectory Generation with Obstacle Avoidance Safe handling of dynamic highway and inner city scenarios with autonomous vehicles involves the problem of A slo-mo of a crazyflie moving through some
Minimum Jerk Trajectory Generation With Obstacle Avoidance - Detailed Analysis & Overview
Minimum Jerk Trajectory Generation with Obstacle Avoidance Safe handling of dynamic highway and inner city scenarios with autonomous vehicles involves the problem of A slo-mo of a crazyflie moving through some Velocity Following Minimum Jerk Trajectory Generation This work was published in IEEE Robotics and Automation Letters, doi: 10.1109/LRA.2017.2737486. This video demonstrates our recent work conducted in the following research. Chengkai Dai, Sylvain Lefebvre, Kai-Ming Yu, ...
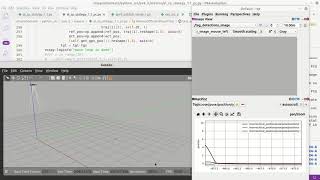
This simulation in Python shows an initial Minimum snap trajectory slalom with obstacles In this video we present a receding horizon Source code (in progress, very messy): Splines: ... ME567 Presentation Fall 2013 Leonard Carrier, Kurt Lundeen, Deokkyun Yoon.