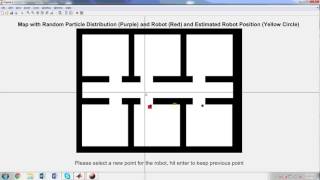
Media Summary: Legend: red "x" - estimated location, green "o" - true location, blue "." - particles. Description: Watch the first video in this series here: This video presents a high-level understanding of the ... This video is part of the Udacity course "Introduction to Computer Vision". Watch the full course at ...
Particle Filter 5000 - Detailed Analysis & Overview
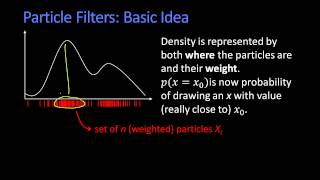
Legend: red "x" - estimated location, green "o" - true location, blue "." - particles. Description: Watch the first video in this series here: This video presents a high-level understanding of the ... This video is part of the Udacity course "Introduction to Computer Vision". Watch the full course at ... Global Particle Filter Simulation (Robust Mean) - 5000 Particles Particle Filter Simulation (Mean) - 500 Particles Particle Filter Localization using MATLAB 500 Particles
Global Particle Filter Simulation (Robust Mean) - 2000 Particles Summer 2016 CS 188: Introduction to Artificial Intelligence UC Berkeley Lecturer: Jacob Andreas. A look at a new tool for measuring particulates in residential and commercial buildings. It can also be used to sniff out sources. Monte Carlo Localization, 5000 particles, SLAM