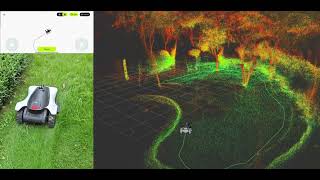
Media Summary: This video presents a new hands-on formation dedicated to providing you with focused content, immediately applied through an ... In this demo, we pull back the curtain on Panther's perception system — showing you exactly what the mower sees as it moves ... This video shows the output generated by a robot developed by UNSW Mechatronics (www.robotics.unsw.edu.au) during ...
Point Cloud Drivable Area Advanced Path Planning - Detailed Analysis & Overview
This video presents a new hands-on formation dedicated to providing you with focused content, immediately applied through an ... In this demo, we pull back the curtain on Panther's perception system — showing you exactly what the mower sees as it moves ... This video shows the output generated by a robot developed by UNSW Mechatronics (www.robotics.unsw.edu.au) during ... The video features real-time navigations and fast calculations on a A new add-on to our collision detector KCD allows to work on native high density Check these new cool features for processing Reality Capture data in Infraworks 360. Remove noise, easily create "key-
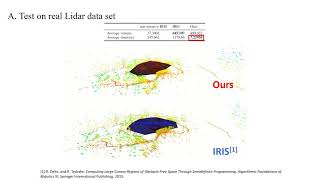
The video shows example result of an variant of RRT* implemented in vox_nav for motion Need to get to your goal quickly? Ensure you This work is under review as: Philipp Krüsi, Paul Furgale, Michael Bosse, and Roland Siegwart, “Driving on Video for the RAL/ICRA2021 submission. Preprint: Code: to be released. In this paper, we ... The latest version of Polygonica supports a full For driverless driving cars, it is essential to detect
This is a short video introduction to our recently submitted paper for RAL-"Identification and Avoidance of Static and Dynamic ...