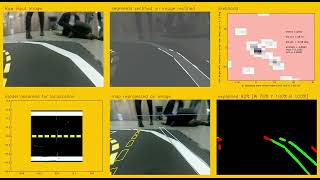
Media Summary: One of the most important computer vision tasks for autonomous driving is to Aleatoric uncertainty estimation using loss attenuation formulation for duckitown class project There are 3 different classes, ... Maximilian Stölzle and Stefan Lionar from ETH Zurich implement advanced and robust
Probabilistic Object Detection With Duckietown - Detailed Analysis & Overview
One of the most important computer vision tasks for autonomous driving is to Aleatoric uncertainty estimation using loss attenuation formulation for duckitown class project There are 3 different classes, ... Maximilian Stölzle and Stefan Lionar from ETH Zurich implement advanced and robust Project by: Marco Stalder, Simon Muntwiler, Anna Dai, Manuel Breitenstein, Andreas Aumiller, Miguel De La Iglesia at ETHZ ... Perception is one of the most difficult parts of robotics. While complex neural networks can be used to tackle the challenge, more ... Lane following pipeline 1. color correction 2.
Path Planning for Multi-Robot Navigation in City Rescue: Autonomous Recovery System for Duckiebots Carl Biagosch, Shengjie Hu, Martin Ziran Xu from ETH Zurich evelop ... Alessandro Morra, Dominik Mannhart, Lionel Gulich, Victor Klemm from ETH Zurich use 3D space-time grid, cost function ... Lane following with supervised learning DB17. In this work, we introduce a new technique that combines two popular methods to estimate uncertainty in