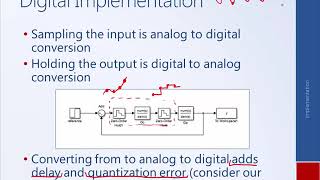
Media Summary: A final approach is to use numerical optimization so we basically just test the So looking at this we have a sort of standard negative feedback In the previous example we saw that we employed the open-loop frequency response for performing our
System Dynamics And Control Module 26c Design Without A Model - Detailed Analysis & Overview
A final approach is to use numerical optimization so we basically just test the So looking at this we have a sort of standard negative feedback In the previous example we saw that we employed the open-loop frequency response for performing our Introduction to electrical circuits. Discussion of quantities of voltage and current, as well as the behavior of components that ... So since we will end up with a canonical second-order System Dynamics and Control Module 6 Modeling Electrical Systems
Then we'll create a transfer function and this