Quick Summary: This one-hour self-training video teaches you the basics of layout building, material flow creation, and optimising your factory ... In this tutorial you will learn how to single axis robot positioner, also referred to as a linear track, from imported geometry in
Visual Components Feature Manipulation Method Jog -
This one-hour self-training video teaches you the basics of layout building, material flow creation, and optimising your factory ... In this tutorial you will learn how to single axis robot positioner, also referred to as a linear track, from imported geometry in In this video, you will learn how to build a complete layout and grasp multiple objects at once using robot programming.
Important details found
- This one-hour self-training video teaches you the basics of layout building, material flow creation, and optimising your factory ...
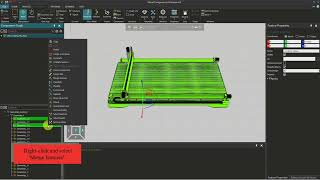
- In this tutorial you will learn how to single axis robot positioner, also referred to as a linear track, from imported geometry in
- In this video, you will learn how to build a complete layout and grasp multiple objects at once using robot programming.
- In this video you will learn how to locate a robot in order to reach all of the required positions in a layout using
Why this topic is useful
This topic is useful when readers need a quick overview first, then want to move into supporting details and related references.
Frequently Asked Questions
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Visual Components Feature Manipulation Method Jog and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.