Media Summary: Consider a continuous time LTI system with unit impulse response. h(t) = u(t) and input x(t) =e-at u(t) ; Find out put y(t) of the ... We can add two functions or multiply two functions pointwise. However, the DSP Lecture 3 Convolution and its properties 720p 30fps H264 192kbit AAC
3 Lecture 3 Convolution Integral Method - Detailed Analysis & Overview
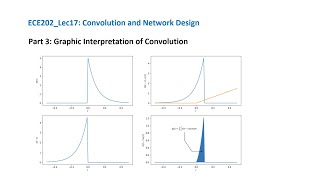
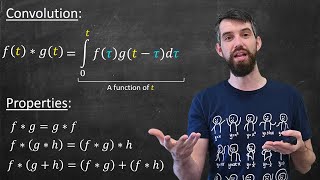
Consider a continuous time LTI system with unit impulse response. h(t) = u(t) and input x(t) =e-at u(t) ; Find out put y(t) of the ... We can add two functions or multiply two functions pointwise. However, the DSP Lecture 3 Convolution and its properties 720p 30fps H264 192kbit AAC This video explains the step by step procedure to solve ECSE-4530 Digital Signal Processing Rich Radke, Rensselaer Polytechnic Institute EC 313 Digital Signal Processing Week 3 Lec 3: Convolution Flip n Drag example