Quick Summary: ICRA 2018 Spotlight Video Interactive Session Tue AM Pod R.6 Authors: Dubé, Renaud; Gollub, Mattia Guglielmo; Sommer, ... Gil Elbaz, Tamar Avraham, Anath Fischer We present an algorithm for registration between a large-scale
3d Localization Based On Point Cloud Data -
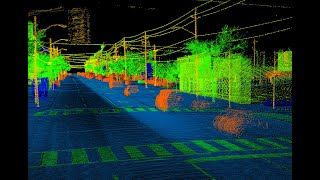
ICRA 2018 Spotlight Video Interactive Session Tue AM Pod R.6 Authors: Dubé, Renaud; Gollub, Mattia Guglielmo; Sommer, ... Gil Elbaz, Tamar Avraham, Anath Fischer We present an algorithm for registration between a large-scale You've scanned a room or object and now you have lots of discrete scans you want to fit together.
Important details found
- ICRA 2018 Spotlight Video Interactive Session Tue AM Pod R.6 Authors: Dubé, Renaud; Gollub, Mattia Guglielmo; Sommer, ...
- Gil Elbaz, Tamar Avraham, Anath Fischer We present an algorithm for registration between a large-scale
- You've scanned a room or object and now you have lots of discrete scans you want to fit together.
- Accompanying video for our RA-L 2018 publication titled "Incremental Segment-
Why this topic is useful
A structured page helps reduce disconnected snippets by grouping the main subject with context, examples, and nearby entries.
Sponsored
Frequently Asked Questions
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Related Images









Sponsored