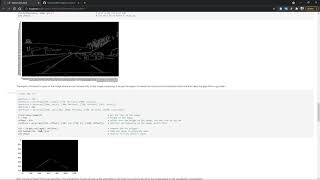
Reference Summary: Compute the camera calibration matrix and distortion coefficients given a set ...
Advanced Lane Line Detection Using Opencv And Numpy -
Crop & Land Management Considerations for this topic.
Important details found
- Compute the camera calibration matrix and distortion coefficients given a set ...
Why this topic is useful
This format is designed to help readers move from a broad question into more specific pages without losing context.
Sponsored
Frequently Asked Questions
What is this page about?
This page summarizes Advanced Lane Line Detection Using Opencv And Numpy and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
Related Images









Sponsored