Media Summary: Objectives: Outline the method of adding the defined input and output signals to the virtual controller Use the built-in I/O ... Objectives Outline the use of Smart Components and Station Logic to simulate physical behaviours Implement various Smart ... Objectives: Create a flow diagram to visualize the motion path for the arm Implement this flow diagram using move instructions ...
Advanced Robotstudio Pick Place Tutorial Part 3 - Detailed Analysis & Overview
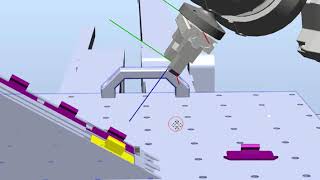
Objectives: Outline the method of adding the defined input and output signals to the virtual controller Use the built-in I/O ... Objectives Outline the use of Smart Components and Station Logic to simulate physical behaviours Implement various Smart ... Objectives: Create a flow diagram to visualize the motion path for the arm Implement this flow diagram using move instructions ... Objectives: Recall the procedure of how to create 3D objects using the modelling tab. Import an To find out more about GBC's Robotics Program, please visit this link - In this A six-axis robot worth $3,000, arm width 940mm, load 5kg -axis robot robot
Speeds for J2 and J3 are around 25 RPM, J4 and J5 are around 50 RPM! Want to build your own? Follow the instructions on ... Basic simulation Pick and Place RobotStudio our servo motor application in robot arm web: Mail:novotech4.com.