Media Summary: Rover starts going to goal using go to point In this video, I dive into the fascinating world of map-free robot In this video i have explained how to simulate a robot in
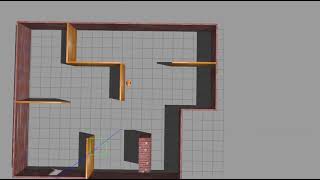
Bug 0 Navigation Algorithm Simulation On Gazebo - Detailed Analysis & Overview
Rover starts going to goal using go to point In this video, I dive into the fascinating world of map-free robot In this video i have explained how to simulate a robot in Reactive navitation using a slightly modified Get instant access to MATLAB & Simulink books, guides, and course files to boost your skills! Get Access Now: ... In this video, the 9th of the series Exploring ROS with a 2 Wheeled Robot, we are gonna see the
This project was carried out by Sandeep Manandhar and Omid Moradtalab for the partial fullfillment of course "Autonomous ... Demonstration of the Simulated Maze world that was constructed using This project focuses on implementing the Bug2












![[ROS Projects] - Bug 0 Foil vs. Bug 1 - Exploring ROS With a 2 wheeled Robot - Part 9](https://i.ytimg.com/vi/C1mzAGNZ0K4/mqdefault.jpg)