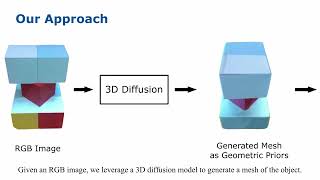
Quick Summary: This video demonstrates the work presented in our paper "Exploiting Priors from 3D Diffusion Models for RGB-Based One-Shot ... In this tutorial I explain the basics of diffusion method and potential-based path planning using a ROS2-based simulator.
Cube With Diffuse Lighting In Roboengine -
This video demonstrates the work presented in our paper "Exploiting Priors from 3D Diffusion Models for RGB-Based One-Shot ... In this tutorial I explain the basics of diffusion method and potential-based path planning using a ROS2-based simulator. How robust is your 3D vision system when parts are shiny, reflective, transparent and the
Important details found
- This video demonstrates the work presented in our paper "Exploiting Priors from 3D Diffusion Models for RGB-Based One-Shot ...
- In this tutorial I explain the basics of diffusion method and potential-based path planning using a ROS2-based simulator.
- How robust is your 3D vision system when parts are shiny, reflective, transparent and the
- Demonstrated using a Kinect RGB-D sensor (only) Playback is about 2x real time motion.
- In this video we learn about URDF and how we can use it to describe our robots.
Why this topic is useful
The goal of this page is to make Cube With Diffuse Lighting In Roboengine easier to scan, compare, and understand before opening related resources.
Frequently Asked Questions
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Cube With Diffuse Lighting In Roboengine and connects it with related entries, references, and supporting context.


![[OpenGL\C++] Cubes and Lights](https://i.ytimg.com/vi/HM9kbK1OBHw/mqdefault.jpg)