Media Summary: Authors: Aalok Patwardhan, Andrew J. Davison Dyson Robotics Lab, Imperial College London Under review ICRA 2024. Okay so we're going to see in the next you know several minutes that D-ADMM: An Algorithm For Distributed Optimization
Distributed Multirobot Task Assignment Via Consensus Admm - Detailed Analysis & Overview
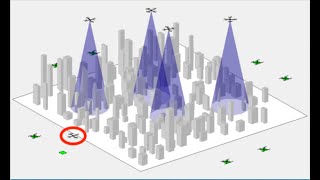
Authors: Aalok Patwardhan, Andrew J. Davison Dyson Robotics Lab, Imperial College London Under review ICRA 2024. Okay so we're going to see in the next you know several minutes that D-ADMM: An Algorithm For Distributed Optimization Stage mobile simulator is used here to show robots (black), Problems in areas such as machine learning and dynamic optimization on a large network lead to extremely large convex ... The applicability of the swarm robots to perform foraging
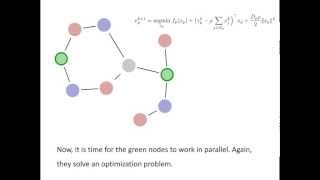
Experiments showing the performance and solution quality of a framework for online ICRA 2018 Spotlight Video Interactive Session Wed AM Pod S.1 Authors: Palmer, Andrew William; Hill, Andrew John; Scheding, ... Robots can communicate *locally*, but the swarm can agree *globally*!** **A single framework to handle swarm In this paper, we present a new multibody physics simulation framework that utilizes the subsystem-based structure and the ... Course: Advanced Optimization and Game Theory for Energy Systems Lecturer: Jalal Kazempour (Technical University of ... Apply Consensus, robot avoidance to form a formation
Supplementary video for the IROS 2023 paper "Differentiable Finite Time Robust Admissible Consensus Control of Multi Robot System under Dynamic Events