Quick Context: High-Speed Navigation in Unknown Environments using Learned Probabilities of Collision In this video we discuss the development and experimental verification of a collision avoidance algorithm, the Triple Integrator ...
High Speed Navigation Using Predictive Mapping -
High-Speed Navigation in Unknown Environments using Learned Probabilities of Collision In this video we discuss the development and experimental verification of a collision avoidance algorithm, the Triple Integrator ... Abstract: Autonomous aerial target tracking in unstructured and GPS-denied environments remains a fundamental challenge in ...
Important details found
- High-Speed Navigation in Unknown Environments using Learned Probabilities of Collision
- In this video we discuss the development and experimental verification of a collision avoidance algorithm, the Triple Integrator ...
- Abstract: Autonomous aerial target tracking in unstructured and GPS-denied environments remains a fundamental challenge in ...
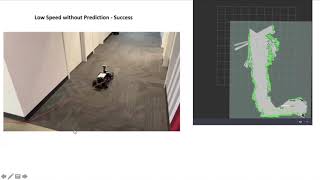
- Thanks to our algorithm, the Husky A200 robotic platform by the Canadian company Clearpath Robotics moves autonomously ...
- Accepted to the 2023 International Conference on Robotics and Automation (ICRA), London.
Why this topic is useful
Readers often search for High Speed Navigation Using Predictive Mapping because they want a clearer explanation, related examples, and a practical way to continue exploring the topic.
Frequently Asked Questions
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.