Media Summary: Watch the first video in this series here: This video presents a high-level understanding of the ... This is a Udacity Project for localization.The project involves building the rover in Gazebo with URDF, adding Gazebo plugins to ... This video is part of the Udacity course "Introduction to Computer Vision". Watch the full course at ...
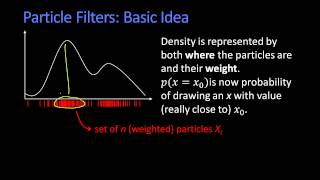
Mcl Particle Filter - Detailed Analysis & Overview
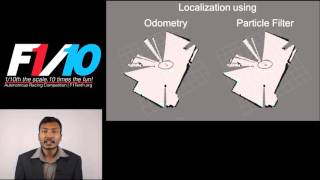
Watch the first video in this series here: This video presents a high-level understanding of the ... This is a Udacity Project for localization.The project involves building the rover in Gazebo with URDF, adding Gazebo plugins to ... This video is part of the Udacity course "Introduction to Computer Vision". Watch the full course at ... This is the first video in a series of videos about robot localization. In other words, finding the location of a robot in a map. Mobile Robotics --- Monte Carlo Localization solution (python3 and Tkinter). Documents for this exercise can be found here: ... Lecture 3.3: Adaptive Monte Carlo Localization
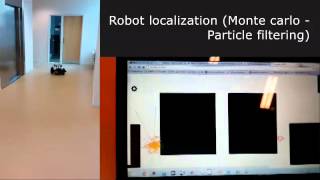
Robot localization (Monte carlo - Particle filter) Implementation of a Monte Carlo localization (