Media Summary: Watch the first video in this series here: This video presents a high-level understanding of the ... ICRA 2018 Spotlight Video Interactive Session Wed AM Pod E.6 Authors: Rechy Romero, Adrian; Borges, Paulo Vinicius Koerich; ... Submission to ICRA 2018 by Adrian Rechy, Paulo V. K. Borges, Alberto Elfes and Andreas Pfrunder.
Ndt Localization With Particle Filter - Detailed Analysis & Overview
Watch the first video in this series here: This video presents a high-level understanding of the ... ICRA 2018 Spotlight Video Interactive Session Wed AM Pod E.6 Authors: Rechy Romero, Adrian; Borges, Paulo Vinicius Koerich; ... Submission to ICRA 2018 by Adrian Rechy, Paulo V. K. Borges, Alberto Elfes and Andreas Pfrunder. This is the first video in a series of videos about robot It is important for autonomously navigating robots to know their position and orientation while moving in their environment. This video is part of the Udacity course "Introduction to Computer Vision". Watch the full course at ...
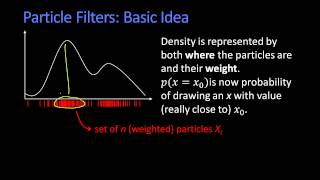
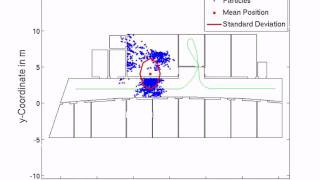
Starting from a unknown position represented by the uniformly scattered Naive Global Localization with Particle Filters After building a map for navigation, the next challenge is determining where the robot is located on that map — without ...