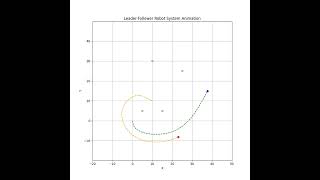
Media Summary: Obstacle avoidance in leader-follower formation using artificial potential field algorithm robotics It takes a significant amount of time and energy to create these free video ... This short video details the methods and results from a model predictive control based
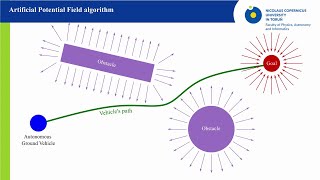
Obstacle Avoidance In Leader Follower Formation Using Artificial Potential Field Algorithm - Detailed Analysis & Overview
Obstacle avoidance in leader-follower formation using artificial potential field algorithm robotics It takes a significant amount of time and energy to create these free video ... This short video details the methods and results from a model predictive control based Implementation of kinematic and dynamic control in ground and aerial robots for trajectory tracking and obstacle avoidance using potential field path planning See the other videos in this series: This video ...
Three methods here are used to solve the local minima problem. 1) Random Search 2) Virtual