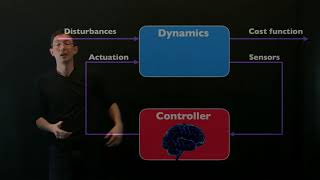
Media Summary: Use these tips to improve the Leap Motion Doctoral Thesis Presentation Recorded on February 2, 2021, Zurich, Switzerland. This project tackles the problem of controlling a physics based biped that can be subject to external pushes and terrain ...
Optimizing Walking Controllers For Uncertain Inputs And Environments Additional Vid - Detailed Analysis & Overview
Use these tips to improve the Leap Motion Doctoral Thesis Presentation Recorded on February 2, 2021, Zurich, Switzerland. This project tackles the problem of controlling a physics based biped that can be subject to external pushes and terrain ... Reward-Adaptive Reinforcement Learning: Dynamic Policy Gradient Optimization for Bipedal Locomotion This lecture provides an overview of how to use machine learning The worlds largest technology companies and science funding agencies are investing millions in robotics. They anticipate robots ...