Quick Summary: Simultaneous Localization and Mapping (SLAM) Course In this Chapter: - Mapping (No Uncertainty) - Mapping (with uncertainty) ... Eastern European Computer Vision Conference 2018 Speaker: Tolga Birdal Topic: Statistical SLAM initialization ...
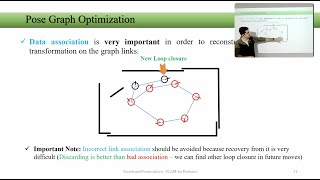
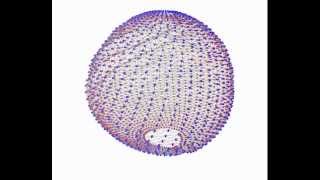
Pose Graph Optimization Sphere -
Simultaneous Localization and Mapping (SLAM) Course In this Chapter: - Mapping (No Uncertainty) - Mapping (with uncertainty) ... Eastern European Computer Vision Conference 2018 Speaker: Tolga Birdal Topic: Statistical SLAM initialization ... Giorgio Grisetti, Cyrill Stachniss, and Wolfram Burgard Non-linear Constraint Network
Important details found
- Simultaneous Localization and Mapping (SLAM) Course In this Chapter: - Mapping (No Uncertainty) - Mapping (with uncertainty) ...
- Eastern European Computer Vision Conference 2018 Speaker: Tolga Birdal Topic: Statistical SLAM initialization ...
- Giorgio Grisetti, Cyrill Stachniss, and Wolfram Burgard Non-linear Constraint Network
- This video is part of an online course, Intro to Artificial Intelligence.
Why this topic is useful
The goal of this page is to make Pose Graph Optimization Sphere easier to scan, compare, and understand before opening related resources.
Frequently Asked Questions
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Pose Graph Optimization Sphere and connects it with related entries, references, and supporting context.