Page Summary: Welcome to our beginner-friendly tutorial on understanding basic ROS2 concepts using Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ...
Ros Turtlesim A Navigation Algorithm -
Welcome to our beginner-friendly tutorial on understanding basic ROS2 concepts using Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... Homework 1 for Embedded Systems in Robotics Mark defines waypoints for turtle.
Important details found
- Welcome to our beginner-friendly tutorial on understanding basic ROS2 concepts using
- Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ...
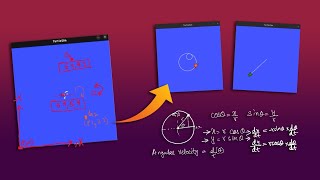
- Homework 1 for Embedded Systems in Robotics Mark defines waypoints for turtle.
- Euclidean distance is explained in step by step approach using ROS2 package
Why this topic is useful
The goal of this page is to make Ros Turtlesim A Navigation Algorithm easier to scan, compare, and understand before opening related resources.
Sponsored
Frequently Asked Questions
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Ros Turtlesim A Navigation Algorithm and connects it with related entries, references, and supporting context.
Topic Gallery









Sponsored