Media Summary: UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". The goal of this project was to create a ros2 package equivalent to the ... In this video, I tried to make a mini tutorial of how to create a line following robot using
Slam In Webots - Detailed Analysis & Overview
UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". The goal of this project was to create a ros2 package equivalent to the ... In this video, I tried to make a mini tutorial of how to create a line following robot using Wish to create interesting robot motion and have more control over your world and robots in 0:15 Introduction 02:35 Glimpse of GMapping 3:59 Implementation 08:57 Start GMapping 10:52 Mistake 12:50 Localization 14:50 ... This is a demo video of My Robot Simulation Project. * The project is a Simulation of Pioneer 3-AT Robot in
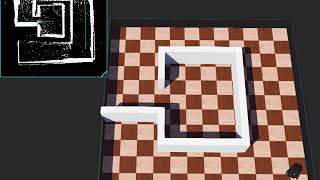
The e-puck2 robot autonomously mapping its environment by bouncing around. Introduction Welcome to the Cleaning Robot project designed by Alessio Borgi! This project is designed to simulate a Cleaning ... ROSbot 2R simulation model running in the @







![Greatest Hack in Webots | Supervisor API Tutorial | Webots Simulator | [Tutorial 18]](https://i.ytimg.com/vi/xMPyqbtYc_E/mqdefault.jpg)





