Media Summary: Theta* for geometric path planning. ORCA for path following with Python Implementation of Reciprocal Velocity Obstacle (RVO) for Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full)
Smooth Collision Avoidance For A First Order Multi Agent System - Detailed Analysis & Overview
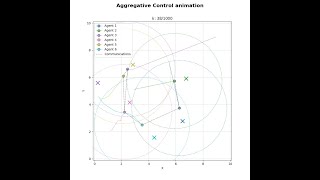
Theta* for geometric path planning. ORCA for path following with Python Implementation of Reciprocal Velocity Obstacle (RVO) for Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Animation of Aggregative Optimization for Multi-agent systems with collision avoidance This work presents a scalable and distributed Barrier functions for multi-agent ellipsoid collision avoidance
animation of Aggregative Optimization for Multi-agent Systems without collision avoidance MPC with Reciprocal Collision Avoidance for Multiple Autonomous Vehicles Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene) This video illustrates five planar quadrotors (quadrotor confined to the 2D plane) avoiding a single static obstacle. This approach ... Two teams of 5 robots playing in RoboCup MSL league are simulated, each player has to move to a different place every 4 ... Multi-Agent Systems for Collision Avoidance Mission of Mobile Robots
This simulation was created in MATLAB. The animation demonstrates the influence of velocity matching. The red 'X' represents ...