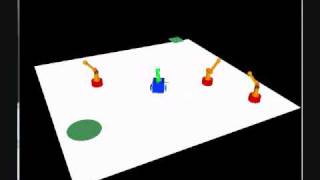
Media Summary: A novel potential field method for obstacle avoidance and path planning of mobile robot A course project in UM ROB550. A downward-looking detects objects on the table (assuming Dynamic Path Planning using Potential Field Method
Static Path Planning For Mobile Robot Using Potential Field Method - Detailed Analysis & Overview
A novel potential field method for obstacle avoidance and path planning of mobile robot A course project in UM ROB550. A downward-looking detects objects on the table (assuming Dynamic Path Planning using Potential Field Method Artificial Potential Fields (APF) Algorithm for Mobile Robot Avoidance of hundreds of moving obstacles Path planning for mobile robot for a given map with static obstacles