Media Summary: Here's another example partial and total knee Replacements are often performed using المعادلتين اللي عندي عندي اللي هو اي كوزين سيتا ساين ص بيساوي اي Oiler showed that three coordinates are necessary to describe a general rotation and these coordinates are called the oiler
Sysc 4206 Surgical Robotics Lecture 3 Euler Angles - Detailed Analysis & Overview
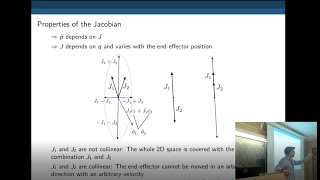
Here's another example partial and total knee Replacements are often performed using المعادلتين اللي عندي عندي اللي هو اي كوزين سيتا ساين ص بيساوي اي Oiler showed that three coordinates are necessary to describe a general rotation and these coordinates are called the oiler Denavit–Hartenberg parameters Planar forward kinematics. I want the extra constraints because I want the I hope you're not too sensitive to these images this is a reminder the class is called
Time could be something if you want it to be quick yeah what else what else could you use in