Media Summary: If you have any copyright issues on video, please send us an email at khawar512.com. Socratic Models (SMs) is a framework that composes multiple large pretrained "foundation" models (e.g., large language models, ... In this guest lecture for the ETH Zurich course "
Vision Based Robot Learning - Detailed Analysis & Overview
If you have any copyright issues on video, please send us an email at khawar512.com. Socratic Models (SMs) is a framework that composes multiple large pretrained "foundation" models (e.g., large language models, ... In this guest lecture for the ETH Zurich course " Introduction to Reinforcement Learning and PPO for robotics VLA for autonomous driving series Everything that moves will be autonomous and will embody For more information about Stanford's online Artificial Intelligence programs visit: This lecture covers: 1.
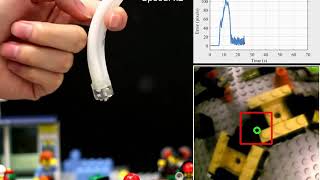
Authors: Yan Wang*, Gautham Vasan*, A. Rupam Mahmood Code: Abstract: Real-time Ocean pollution keep on increasing since plastic and fossil fuel are vital needs for humans for centuries. Cleaning surface wastes ... ICRA 2018 Spotlight Video Interactive Session Thu AM Pod Q.7 Authors: Quillen, Deirdre; Jang, Eric; Nachum, Ofir; Finn, Chelsea; ... We present ReViND -- a method that combines the strength of offline RL with topological graphs to get customizable long-range ... Vision based Online Learning Kinematic Control for Soft Robots


![Lucas Beyer: Vision in the Age of LLMs [ETHZ Robot Learning 2026]](https://i.ytimg.com/vi/0XB7fNS_ONg/mqdefault.jpg)
![Introduction to Robot Learning (ML and AI) [Part 1] (Dr. Ben Amor, Tech Talk @ CodeDay Labs 2021)](https://i.ytimg.com/vi/O9Zsb1mnOzY/mqdefault.jpg)