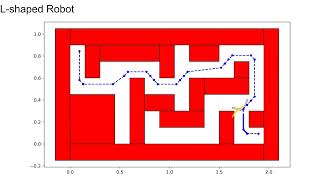
Media Summary: Contract-based control barrier function for obstacle avoidance Control Barrier Function In Action (Obstacle Avoidance) Autonomous robot navigation can be particularly demanding, especially when the surrounding environment is not known and ...
Contract Based Control Barrier Function For Obstacle Avoidance - Detailed Analysis & Overview
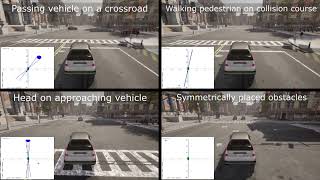
Contract-based control barrier function for obstacle avoidance Control Barrier Function In Action (Obstacle Avoidance) Autonomous robot navigation can be particularly demanding, especially when the surrounding environment is not known and ... This video shows the simulations and experimental results that validate the efficacy of a coalition cone This video presents our ICRA 2023 paper on combining CBFs and NeRFs to enforce safety constraints for vision- Abstract: Unmanned aerial vehicles (UAVs), specifically quadrotors, have revolutionized various industries with their ...
Barrier functions for multi-agent ellipsoid collision avoidance Autonomy advances have enabled robots in diverse environments and close human interaction, necessitating Control Barrier Function based safe navigation -- experiment This colloquium, held by Assistant Prof. Federico Califano at Robotics and Mechatronics (RaM) group (), ... Supplementary material for the paper "Multi-Agent





![[ICRA 2023] Enforcing safety for vision-based controllers via Control Barrier Functions and NeRFs](https://i.ytimg.com/vi/BXh05217FJ4/mqdefault.jpg)