At a Glance: Second experiment running all robot data recorded as text file in robot, will available soon either in matlab/ GNU-Octave and png ... First experiment running all robot leader - follower (NAO1-red) as the leader and the rest as the follower.
Decentralized Formation Control Using Consensus -
Second experiment running all robot data recorded as text file in robot, will available soon either in matlab/ GNU-Octave and png ... First experiment running all robot leader - follower (NAO1-red) as the leader and the rest as the follower. Riccardo Falconi, Lorenzo Sabattini, Cristian Secchi, Cesare Fantuzzi, Claudio Melchiorri.
Important details found
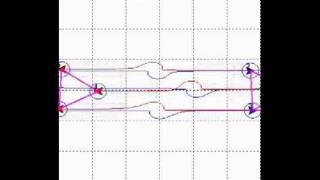
- Second experiment running all robot data recorded as text file in robot, will available soon either in matlab/ GNU-Octave and png ...
- First experiment running all robot leader - follower (NAO1-red) as the leader and the rest as the follower.
- Riccardo Falconi, Lorenzo Sabattini, Cristian Secchi, Cesare Fantuzzi, Claudio Melchiorri.
Why this topic is useful
This topic is useful when readers need a quick overview first, then want to move into supporting details and related references.
Frequently Asked Questions
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Decentralized Formation Control Using Consensus and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.