Media Summary: One of the most important computer vision tasks for autonomous driving is to Have you ever built your own neural network, collected and annotated data, used it to train an Maximilian Stölzle and Stefan Lionar from ETH Zurich implement advanced and robust
Duckietown Object Detection - Detailed Analysis & Overview
One of the most important computer vision tasks for autonomous driving is to Have you ever built your own neural network, collected and annotated data, used it to train an Maximilian Stölzle and Stefan Lionar from ETH Zurich implement advanced and robust Project by: Marco Stalder, Simon Muntwiler, Anna Dai, Manuel Breitenstein, Andreas Aumiller, Miguel De La Iglesia at ETHZ ... Advanced visual perception encompasses many tasks, e.g., A project by Ben Weber at ETH Zurich demonstrating Autolab monitor and control through a GUI. Features include light field ...
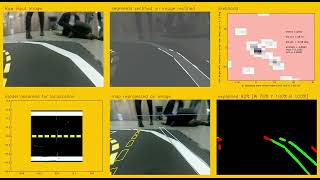
Lane following pipeline 1. color correction 2. Lane following with supervised learning DB17. Perception is one of the most difficult parts of robotics. While complex neural networks can be used to tackle the challenge, more ... Nikolaj Witting, Fidel Esquivel Estay, Johannes Lienhart, and Paula Wulkop from ETH Zurich implement dynamic obstacle ... A demonstration of autonomous parking and parking lot design for a Aleatoric uncertainty estimation using loss attenuation formulation for duckitown class project There are 3 different classes, ...