Media Summary: This video is part of the Udacity course "Introduction to Computer Vision". Watch the full course at ... Watch the first video in this series here: This video presents a high-level understanding of the ... This video was produced summarizing my class project in the Artificial Intelligence Course taught at the University of Wyoming by ...
Example Of Working Particle Filter - Detailed Analysis & Overview
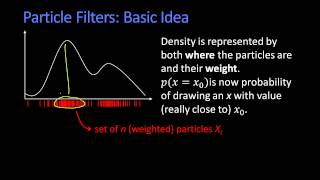
This video is part of the Udacity course "Introduction to Computer Vision". Watch the full course at ... Watch the first video in this series here: This video presents a high-level understanding of the ... This video was produced summarizing my class project in the Artificial Intelligence Course taught at the University of Wyoming by ... This is the last of five videos in the iterative data assimilation block in our Ecological Forecasting series. It extends our iterative ... Black dot: ground truth (=real object position) - Red line: noisy observation - Thick line: Estimated velocity. The video compares ... This is the first video in a series of videos about robot localization. In other words, finding the location of a robot in a map.
Legend: red "x" - estimated location, green "o" - true location, blue "." - particles. Description: Source code: Udacity Nanodegree Self-driving Car Engineer - Course ... Paper presented in ION GNSS+ 2022. Shubh Gupta, Adyasha Mohanty and Grace Gao. For paper, slides and other publications ...