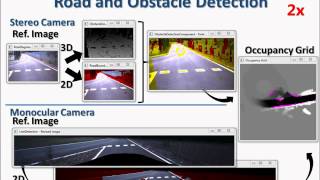
Media Summary: By Muhamad Azizi Adnan; Supervised by Dr Mohd Ariffanan Bin Mohd Basri; 3rd year MTE Individual Project (2011/2012), University of Manchester Environment perception layer of the vehicle APACHE during an autonomous navigation. This approach was based on 2D/3D ...
Image Processing Obstacle Avoidance 2 - Detailed Analysis & Overview
By Muhamad Azizi Adnan; Supervised by Dr Mohd Ariffanan Bin Mohd Basri; 3rd year MTE Individual Project (2011/2012), University of Manchester Environment perception layer of the vehicle APACHE during an autonomous navigation. This approach was based on 2D/3D ... In this code We Use following concepts from openCv- 1.Reading Institut für Automatisierungstechnik (IAT), Universität Bremen (ROS, OpenCV, Stereo Vision, Image Processing Application for Mobile Robot Obstacle Avoidance Using Kinect Camera
Line Following on the DaNI with Decision making and The Pioneer robot follows a line and avoids This was a beginner project done by me and my friend Bini koshy Varghese for our second semester M.Tech Mechatronics ... This fully autonomous drone has an onboard computer 'brain', camera 'eyes', and an algorithm that generates the fastest path ...