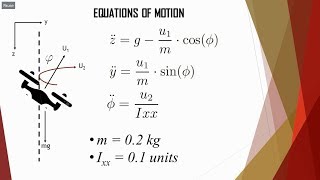
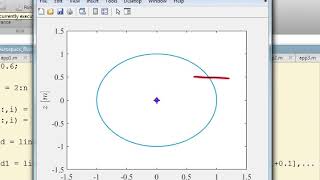
Media Summary: pyQuadTool Seguimiento de trayectoria mediante Presentation detailing the development of the "Demonstration of my Model Predictive Path Integral (MPPI)
Trajectory Tracking Pid Control For Uav Quadcopter Simulator Python Thesis - Detailed Analysis & Overview
pyQuadTool Seguimiento de trayectoria mediante Presentation detailing the development of the "Demonstration of my Model Predictive Path Integral (MPPI) Target Speed Constant = 50 Source code at:
![Trajectory Tracking PID Control for UAV Quadcopter Simulator Python [Thesis]](https://i.ytimg.com/vi/pRRw_VXqumo/mqdefault.jpg)
![PID Control for UAV Quadcopter Simulator Python [Thesis]](https://i.ytimg.com/vi/aefC0R3UPGc/mqdefault.jpg)





![[PythonRobotics] Path tracking simulation with LQR steering control and PID speed control.](https://i.ytimg.com/vi/XQs0BnYLbYk/mqdefault.jpg)



