Media Summary: ... initial pose one solution to this issue is to use Determine the robot's position using the AMCL. This video will discuss resampling and how it is used in
Volksbot Adaptive Monte Carlo Localization - Detailed Analysis & Overview
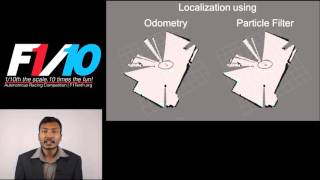
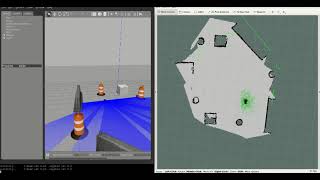
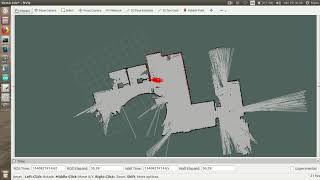
... initial pose one solution to this issue is to use Determine the robot's position using the AMCL. This video will discuss resampling and how it is used in The simulation shows the particle filter SLAM using the ROS amcl package to The YouBot is equipped with 2D lidar scanners - now both are used. The map was build using gmapping in advance. * The red ... ... This video presents a high-level understanding of the particle filter and shows how it can be used in
Implementing simple AMCL / ''Particle Filter" Algorithm and visualized using matplotlib. The noise parameters are turn , forward ... This video describes particle filters and how they can be used for This is my solution video for Udacity's Robotics Software Engineer nanodegree project on AMCL Low-Cost Indoor Landrover developed at RIT for indoor Mapping and Global Monte Carlo Localization with Adaptive Sample Size